Countering Dyslexia Adverse Effects with Large Language Models (LLMs) like ChatGPT
15 May 2024
7:30 pm - 9:00 pm

Antonio Hidalgo-Landa, Chair, BCS Consultancy Specialist Group
Explore the transformative power of technology in overcoming dyslexia challenges. Join Antonio Hidalgo-Landa for an insightful talk on leveraging Large Language Models (LLMs) to support learning differences. Discover how these innovations are reshaping education and accessibility. This session invites you to ponder the evolving role of technology in learning and its potential implications. Antonio will share practical strategies that harness LLMs to mitigate dyslexia’s impact. This discussion also prompts us to consider the evolving role of technology in education. As we delve into the possibilities of LLMs, let’s ponder: Could there be a future where relying on machines alters the dynamics of creative thinking? Be part of this engaging conversation and broaden your perspective on education and technology. Your input and feedback on these techniques are invaluable. We’re eager to connect with those who can benefit and learn from your experiences too. Join us for an engaging discussion that offers a fresh perspective on learning, technology, and empowerment.
Bio:
Antonio Hidalgo-Landa, a Senior Technical Account Manager at a leading pharmaceutical traceability solution provider, is a strong contributor to the industry’s digital transformation. He also chairs the BCS Consultancy Specialist Group, showcasing his commitment to professional growth and knowledge dissemination. Overcoming dyslexia himself, Antonio is fervently dedicated to employing technology, including Large Language Models (LLMs) like ChatGPT, to bolster accessibility and inclusivity. With a background in Artificial Intelligence, Antonio bridges innovation and empowerment, investigating how LLMs can effectively counter dyslexia’s challenges.
This event is supported by the BCS Digital Divide Specialist Group
[Event Summary] Low-code Application Platforms: History, Design, and Applications
[Event Summary] Women in IT Event
[Event Summary] Back-chat: Generative AI and the Chatbot Revolution
BCS’ Fellows Technical Advisory Group (F-TAG) is recruiting new members
BCS’ Fellows Technical Advisory Group (F-TAG) was formed two years ago to provide insight on cutting-edge technologies and professional practice.
The group has had a transformational impact in that time, working closely with the Policy and PR team, to grow our reputation for thought leadership with government departments, sector bodies, the media and our membership community.
F-TAG’s work includes:
A paper on The Online Safety Bill produced with input from key member groups such as Law, AI and Software.
A proactive position paper arguing against a ‘pause’ on AI development.
Leading the development of BCS’ open letter calling for AI to be seen as force for good, rather than an existential threat, which was covered by the BBC.
Most recently F-TAG was acknowledged by the government for supporting it’s detailed process framework for AI Safety.
Could you be an F-TAG member?
F-TAG is beginning a new round of member recruitment; we are seeking Fellows from diverse demographic and professional backgrounds with proven expertise in a range of areas of technology and practice.
The map of expert fields we need to represent is below – please do state your areas of expertise on the short application form, should you choose to apply:
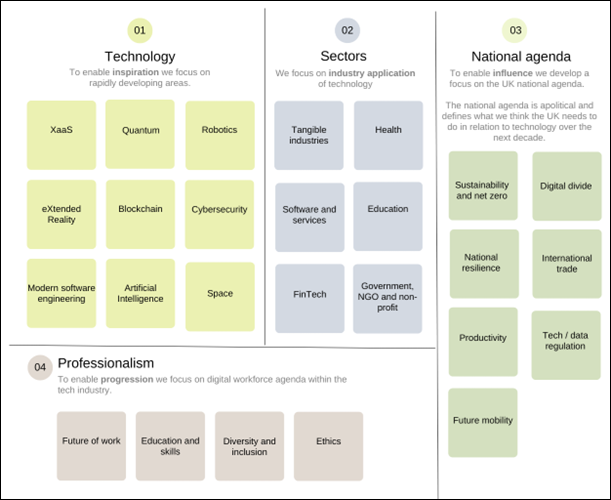
All F-TAG members must care about diversity and inclusion, and believe in the principle of making technically complex subjects accessible to a range of audiences.
What’s required of me?
F-TAG meets online monthly. Between meetings, members are expected to lead, or collaborate on, the writing of BCS policy position papers with support of colleagues and the central BCS team.
If you are a BCS Fellow are interested in applying, Please complete this form by Wednesday 20th December 2023.
If you have questions before applying please email F-TAG Chair Adam Leon Smith FBCS (adamleonsmith@protonmail.com) and Deputy Chair Christine Ashton FBCS (christine.ashton@bcs.org).
Appointments to F-TAG are made by a Selection Committee reporting to Community Board – for full details please see the terms of reference on the F-TAG webpage.

